- UMotion - Animation Editor
-
 Questions
Questions
Constraining movement with non-humanoid IK rig
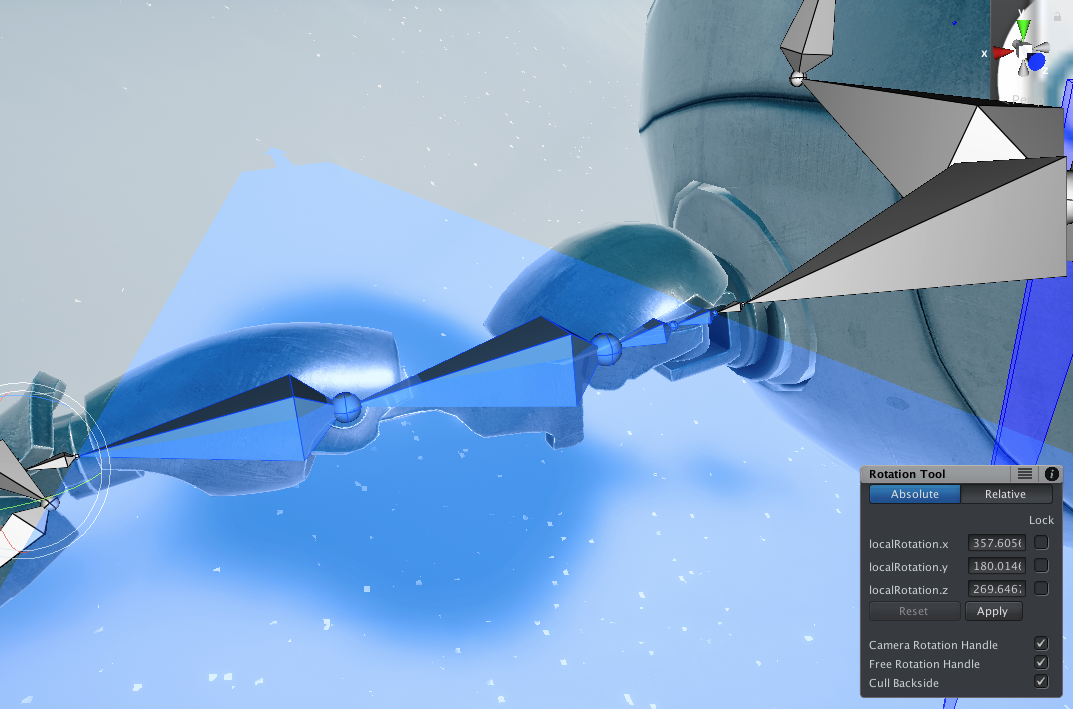
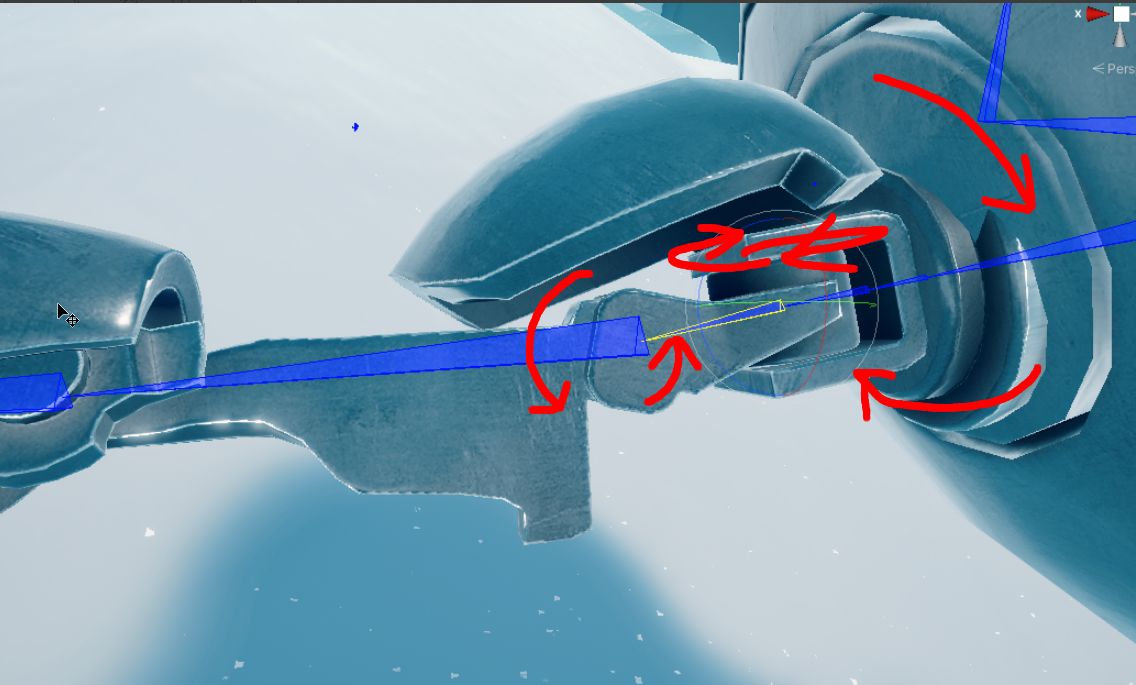
I've got a somewhat complex robot arm that I'm trying to get IK manually setup in UMotion. I got the IK chain setup and working, but because there are 4 bones, it is behaving strangely. The problem is that the first 2 bones from the shoulder need to have their rotation constrained as they shouldn't have free movement, but I can't seem to find a way to limit this with the constraints. Is there any way to get this working correctly within UMotion or will it just not be possible with this type of model/rig?
Here is a vide of just the two bones from the hand and then all 4 bones: https://streamable.com/7nhxau
Answer
Hi,
thank you very much for your support request.
With UMotion Pro's built in IK, you can exclude whole bones from the IK calculation but you can't constrain a bone's degree of freedom (e.g. constraining around a rotation axis). To completely exclude a bone from the IK chain, use the chain mask property:
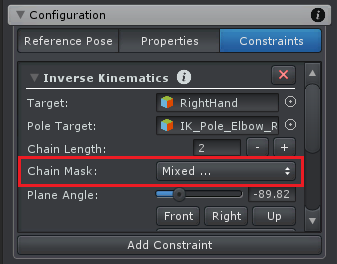
If you want to constrain a bone's rotation axis, consider using a custom/3rd party IK solution combined with UMotion. Final IK supports that sort of constraint for example. To learn more about using Final IK with UMotion, please check out the manual at chapter "Pose Editor / Options" and headline "Extending UMotion". Here is also a related forum thread with additional details: https://support.soxware.com/communities/1/topics/682-how-can-i-use-umotion-with-final-ik
Please let me know in case you have any follow-up questions.
Best regards,
Peter

Customer support service by UserEcho

Hi,
thank you very much for your support request.
With UMotion Pro's built in IK, you can exclude whole bones from the IK calculation but you can't constrain a bone's degree of freedom (e.g. constraining around a rotation axis). To completely exclude a bone from the IK chain, use the chain mask property:
If you want to constrain a bone's rotation axis, consider using a custom/3rd party IK solution combined with UMotion. Final IK supports that sort of constraint for example. To learn more about using Final IK with UMotion, please check out the manual at chapter "Pose Editor / Options" and headline "Extending UMotion". Here is also a related forum thread with additional details: https://support.soxware.com/communities/1/topics/682-how-can-i-use-umotion-with-final-ik
Please let me know in case you have any follow-up questions.
Best regards,
Peter