- UMotion - Animation Editor
-
 Questions
Questions
Converting forward walk into a diagonal walk
I'm trying to turn a forward walk animation into a diagonal. For this, I take the delta Z position from the final frame and use trig to get the new X & Z delta, ie Z.Sin(45) & Z.Cos(45). Using Curves, I use the blue bars from the positional data to smooth down the Z motion, while for the X motion, I set the final frame position to Z.Cos(45) and then have to remove all frame positional data in between the 1st and last frame. This results in a small amount of motion being lost and the character seems to slide around a little.
I'm converting rotations to Euler Interpolation for rotating the character, however I don't think this has any bearing on the positional data.
Is there a better way to do this perhaps?
Answer
Hi Craig,
thank you very much for your support request.
You can do this in the Inspector of your animation:
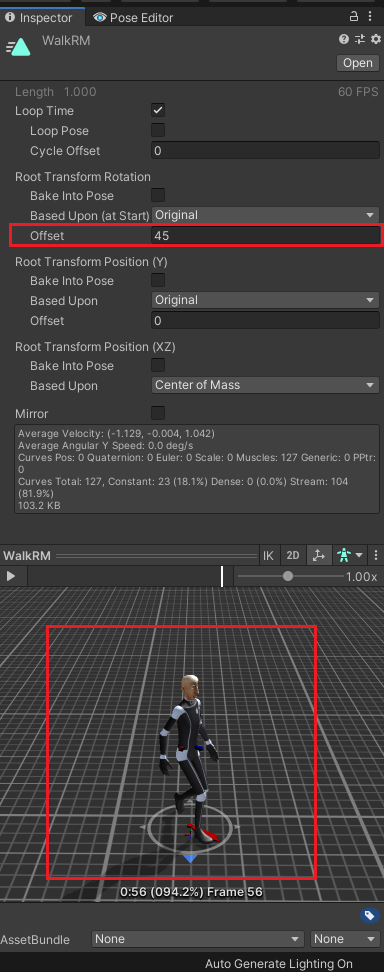
Please let me know in case you have any follow-up questions.
Best regards,
Peter
Thank you for this. it will work ok, however I'm just wondering if there is a way offset the rotation implicitly to the positional data in the animation.
I found that if I apply the rotation offset to the source animation before importing it into UMotion, it works perfectly. Thanks for the assist.

Customer support service by UserEcho

Hi Craig,
thank you very much for your support request.
You can do this in the Inspector of your animation:
Please let me know in case you have any follow-up questions.
Best regards,
Peter